The automotive industry has gone through a large number
of changes over the last 20-30 years, with franchises switching between
the large players, and the smaller players being swallowed up as part
of industry consolidation. The industry is constantly striving to
remain competitive in the face of increased competition and to do so it
needs to bring efficiencies into all parts of the business.
This article describes how an automotive manufacturer engaged 1Spatial to help improve and streamline the engine design process. 1Spatial was able to spatially analyze tens of thousands of roads to simulate driving conditions, providing an alternative to the unrealistic task of driving every single road to gather measurements. This approach offered opportunities for improvements in the engine design process and cut operational costs while maintaining the high levels of mechanical reliability.
When cars "corner," oil is forced to one end of the engine causing "oil starvation," which can harm the engine if it is not designed to cope with it. The longer the bend and the higher the G-forces (the lateral acceleration experienced when a car corners, expressed in Gs), the more damage can be caused. High G-forces occur when a bend is steep relative to the speed of the vehicle. Designing the engine to cope with extreme oil starvation that would never occur in real conditions would waste of money, while underestimating the forces that an engine is subjected to could result in an unreliable car. The automotive manufacturer wanted to improve its engine design process and reduce production costs. Efficiencies can be made if the engine is neither over- nor under-engineered, but achieving this balance demands the ability to accurately simulate the forces that will occur in real life. It was simply not practical to test drive the entire road network. It was, however, necessary to examine the road network, accurately simulate the G-forces and provide data so that representative routes, based on scientific results rather than estimates, could be found to use as part of the engine design process.
The Solution
1Spatial was able to offer the manufacturer the sample data that it needed through the use of advanced geospatial data analysis. This analysis could target the most damaging bends, of varying lengths, so that a sensor car could then drive that roadway to measure actual damage. To do this, 1Spatial enlisted the help of Tele Atlas to provide a high quality and up-to-date digital map database. It used the road network information to simulate driving the bends at the maximum speed limit (or maximum achievable speed) and to calculate the longest lasting and highest G-forces encountered.
By determining the areas of high G-force, the engineers would be able to determine driving patterns and possible engine oil displacement. From the results of longest and highest G-force areas, the most damaging bends could then be driven to confirm the results and provide detailed data from on-board sensors. A pilot project was conducted, initially in the United Kingdom, during which G-forces were calculated and tracked by advanced processing algorithms, developed to simulate driving along the roads at the speed limit (see methodology). The data was processed within Radius Studio, a geospatial integration and rules engine platform, in an Oracle environment and FME from Safe Software was used for transforming and loading the data into Oracle and attaching speed limits to each road section (see Figure 1). The algorithms and techniques that were developed and proven during the UK pilot project were then used to analyze the road network in Alpine regions and German Autobahn roads. The aim of this exercise was to find the most potentially damaging bends, that is the bends during which the engine experiences the highest G-force for the longest amount of time, and ascertain which roads and bends should be targeted for driving tests.
Process
The G-force algorithm was built using the geometry-processing library within Radius Studio. Each of the road geometries had its own associated speed limit and roads with no speed limit were given a nominal speed, provided by the manufacturer, based on the road classification. As the algorithm "drives" along the road, stepping over the vertices of the geometries, the radius of curvature is calculated, followed by the G-force at the speed limit. This is achieved using standard Newtonian physics: Radial acceleration a = v2 / r where v is velocity, which we know from the speed limit, and r is the radius of the geometry at that point. As the algorithm proceeds along the road geometries, the G-force is recorded against time. The time can be calculated because we know the distance between vertices and the speed and time = distance / speed.
The algorithm tracks how long the G-force remains above each of the nine G-force intervals and whenever the G-force dips below the limit for more than the "buffer time" then the data is written to the Oracle database, recording an "event" consisting of the G-force level, as well as the time, total angle turned, average radius and details about the road and its location (see Figure 2).
Proving the Algorithm
In order to validate the accuracy of the algorithm, a sample route was chosen, covering a broad range of bends of varying severity, for comparing the results of automated processing with the readings from a sensor car. Comparing the figures showed a very high correlation (correlation coefficient = 0.998) between the simulated results and the actual results (see figure 3).
The Results
The analysis was able to pinpoint the 450 most extreme G-force bends for the data in the area of interest. The manufacturer was then able to plan test drives, specifically targeting those roads that had, quantitatively, the highest and longest G-forces. The benefits of this approach are that the manufacturer can now automate the process of analyzing large areas of road networks. This avoids the impractical task of attempting to drive tens of thousands of roads and provides an accurate, repeatable and representative sample of roads based on empirical measure to use in the design process. By relying on the processing algorithms in Radius Studio, coupled with the quality of the Tele Atlas data, it is possible to achieve a more cost-effective design process while ensuring the continued production of highly reliable cars.
Future Work
This innovative process can now be applied to road networks in a number of other countries for work on associated projects. A similar approach could also be considered for the impact on tires, transmissions, fuel economy, etc. Use of height data from other industry data providers, such as Intermap, could also be used for calculations of the load when towing vehicles up steep or long hills.
This article describes how an automotive manufacturer engaged 1Spatial to help improve and streamline the engine design process. 1Spatial was able to spatially analyze tens of thousands of roads to simulate driving conditions, providing an alternative to the unrealistic task of driving every single road to gather measurements. This approach offered opportunities for improvements in the engine design process and cut operational costs while maintaining the high levels of mechanical reliability.
When cars "corner," oil is forced to one end of the engine causing "oil starvation," which can harm the engine if it is not designed to cope with it. The longer the bend and the higher the G-forces (the lateral acceleration experienced when a car corners, expressed in Gs), the more damage can be caused. High G-forces occur when a bend is steep relative to the speed of the vehicle. Designing the engine to cope with extreme oil starvation that would never occur in real conditions would waste of money, while underestimating the forces that an engine is subjected to could result in an unreliable car. The automotive manufacturer wanted to improve its engine design process and reduce production costs. Efficiencies can be made if the engine is neither over- nor under-engineered, but achieving this balance demands the ability to accurately simulate the forces that will occur in real life. It was simply not practical to test drive the entire road network. It was, however, necessary to examine the road network, accurately simulate the G-forces and provide data so that representative routes, based on scientific results rather than estimates, could be found to use as part of the engine design process.
The Solution
1Spatial was able to offer the manufacturer the sample data that it needed through the use of advanced geospatial data analysis. This analysis could target the most damaging bends, of varying lengths, so that a sensor car could then drive that roadway to measure actual damage. To do this, 1Spatial enlisted the help of Tele Atlas to provide a high quality and up-to-date digital map database. It used the road network information to simulate driving the bends at the maximum speed limit (or maximum achievable speed) and to calculate the longest lasting and highest G-forces encountered.
By determining the areas of high G-force, the engineers would be able to determine driving patterns and possible engine oil displacement. From the results of longest and highest G-force areas, the most damaging bends could then be driven to confirm the results and provide detailed data from on-board sensors. A pilot project was conducted, initially in the United Kingdom, during which G-forces were calculated and tracked by advanced processing algorithms, developed to simulate driving along the roads at the speed limit (see methodology). The data was processed within Radius Studio, a geospatial integration and rules engine platform, in an Oracle environment and FME from Safe Software was used for transforming and loading the data into Oracle and attaching speed limits to each road section (see Figure 1). The algorithms and techniques that were developed and proven during the UK pilot project were then used to analyze the road network in Alpine regions and German Autobahn roads. The aim of this exercise was to find the most potentially damaging bends, that is the bends during which the engine experiences the highest G-force for the longest amount of time, and ascertain which roads and bends should be targeted for driving tests.
 |
Process
- Before simulating the driving, the data for the entire road network underwent automated pre-processing to "stitch" sections of road together, in case a bend was split across several network sections. This data integration combined one network section with another when their names were identical or when there were only two network sections meeting at a given point.
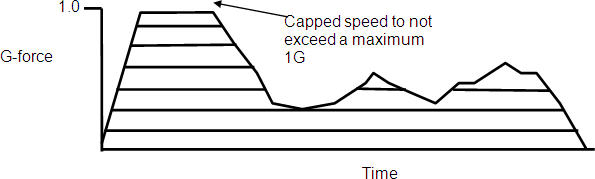
- Road driving was simulated at the speed limit for the road. However, as the speed limit is not always attainable in real life, it was capped to restrict the car to a lateral 1.0 G-Force, which was specified by the manufacturer (for roads with no speed limit, e.g. German Autobahns, a typical speed was provided by the manufacturer).
- The G-force algorithm "drives" the roads and calculates how long in seconds the car undergoes each of 9 increments of 0.1 G, from 0.1 to 1.0 G.
- A "buffer" time was used to differentiate between bends. For example, two bends separated by a short straight section would be considered as a single bend if the straight section only took a very small time to drive, where "very small" is defined by a time parameter, defined by the manufacturer. This parameter is defined on the basis that oil is viscous and moves in the engine when a car corners, then takes time to settle back. If a bend follows another very quickly, with only a small gap in between, the oil will not have had time to settle back and therefore the two bends can be considered part of one single, long bend.
- Only lateral G-forces are of interest; braking and acceleration G-forces are not considered.
- Information on each of the 450 most damaging bends is provided, having been created by finding the 50 longest (in terms of time) bends in each of the nine G-force increments.
- Each bend is post-processed to find the nearest town to help engineers locate the road.
- A report is produced including the bend name, coordinates, length, total angle of turn, average radius and maximum G-force achieved.
The G-force algorithm was built using the geometry-processing library within Radius Studio. Each of the road geometries had its own associated speed limit and roads with no speed limit were given a nominal speed, provided by the manufacturer, based on the road classification. As the algorithm "drives" along the road, stepping over the vertices of the geometries, the radius of curvature is calculated, followed by the G-force at the speed limit. This is achieved using standard Newtonian physics: Radial acceleration a = v2 / r where v is velocity, which we know from the speed limit, and r is the radius of the geometry at that point. As the algorithm proceeds along the road geometries, the G-force is recorded against time. The time can be calculated because we know the distance between vertices and the speed and time = distance / speed.
The algorithm tracks how long the G-force remains above each of the nine G-force intervals and whenever the G-force dips below the limit for more than the "buffer time" then the data is written to the Oracle database, recording an "event" consisting of the G-force level, as well as the time, total angle turned, average radius and details about the road and its location (see Figure 2).
 |
Proving the Algorithm
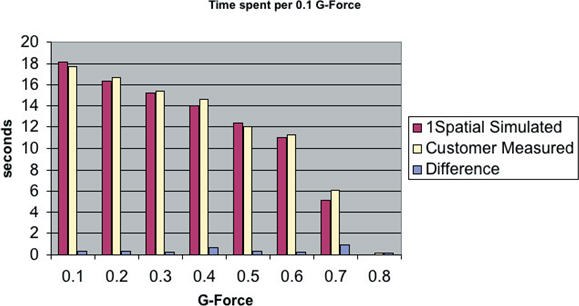
In order to validate the accuracy of the algorithm, a sample route was chosen, covering a broad range of bends of varying severity, for comparing the results of automated processing with the readings from a sensor car. Comparing the figures showed a very high correlation (correlation coefficient = 0.998) between the simulated results and the actual results (see figure 3).
 |
The Results
The analysis was able to pinpoint the 450 most extreme G-force bends for the data in the area of interest. The manufacturer was then able to plan test drives, specifically targeting those roads that had, quantitatively, the highest and longest G-forces. The benefits of this approach are that the manufacturer can now automate the process of analyzing large areas of road networks. This avoids the impractical task of attempting to drive tens of thousands of roads and provides an accurate, repeatable and representative sample of roads based on empirical measure to use in the design process. By relying on the processing algorithms in Radius Studio, coupled with the quality of the Tele Atlas data, it is possible to achieve a more cost-effective design process while ensuring the continued production of highly reliable cars.
Future Work
This innovative process can now be applied to road networks in a number of other countries for work on associated projects. A similar approach could also be considered for the impact on tires, transmissions, fuel economy, etc. Use of height data from other industry data providers, such as Intermap, could also be used for calculations of the load when towing vehicles up steep or long hills.
From Our Homepage
Saying Farewell to an Amazing Journey
Communicating with Maps
Is There a GIS Career Ladder?
What does it mean to be geospatially smart? Series
Ways Real Estate and Property Developers Utilize Melissa GeoData for Data-Driven Decisions
Unlocking Value From Daily Satellite Imagery and Insights
Maximizing the Value of Your Address Data with Geo Addressing
How Indoor Mapping Enhances the Security of Smart Buildings
Look Ahead: AI, Location Intelligence and Efficiency
Collaboration Takes on Sea Level Rise & Dynamic Technology Environments
Brownies for Brownfields
Has Everything Been Mapped Already?
How Is Data Literacy Changing in an Artificial Intelligence Landscape
Portfolios for GIS Professionals: More Than Just Maps
How to Create a Distance Matrix in QGIS - A Step-by-Step Guide
7 Ideas for Bringing GIS into the K-12 Classroom
The Geography of Movement