 |
Beyond the effective reach of GPS, surveyors have traditionally used hand laser range finders with Tablet PCs to collect interior space data. This process is very effective for capturing room geometries, but can be very time consuming and especially difficult in non-traditional architectures. The repetitive nature of hand measuring can leave you feeling like a machine by the end of the day. The solution: Don’t be a robot, use one.
 |
The raw product of the robotic survey is a high resolution map that defines the interior space down to millimeter accuracy. These high resolution floor plans provide a bird’s eye view of the interior spaces in a building, including what is actually in them. These data are then processed and attributed by the survey team on tablet PCs in the field, capturing information about room use and occupancy. The final product is a high quality map of the interior space data of the facility that is ready to integrate into a GIS.
Patricia McSherry, chief GIO at Langley Air Force Base, was an early adopter of the survey method. "We are continually looking for new and innovative ways to gather data in order to help base personnel make better decisions through GIS,” said McSherry. "In this case, our search took us to the cutting edge of the robotics world."
McSherry put the technology through its paces recently during a pilot survey at Langley. During the survey, the robot was able to capture data for over 100,000 ft2 of office space per day, including cubicles and other non traditional features.
That may be fast compared to traditional surveys, but you have to look deeper at the real value of this interior space data to fully understand the benefits. "There is immense value in this data," said David Berez, a principal at Post Office Editorial. "With this method, you can get a real-time snapshot of all your facility interests in a fraction of the time. You can also use it to validate existing CAD/GIS data to look for holes or discrepancies."
 |
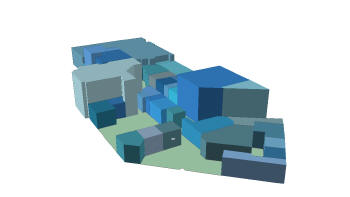
Robotic data can also be used to visualize interior space in 3D for applications that require volume or proximity analysis. This extrusion capability provides decision makers with the ability to make more efficient matches between available space and those who need the space.
So if the robotic platform is smart enough to map its environment, what happens when it can recognize where it is on the map? The term "Spatially Intelligent" defines a robotic entity which can determine its location by comparing the spatial data it has in memory to those which it sees in real-time through a combination of onboard sensors. Once localized, it understands the space and can dynamically navigate its surroundings. Adding specialized sensors enables the creation of focused missions for the autonomous agent, capable of patrolling the building while sending back sampling data about the environment.
Web services allow the robot to query a GIS based on location, and establish a two-way flow of information. The result: a spatially intelligent field agent that can collect, consume and relay information in real-time.
While the true potential for these systems unfolds, some GIS industry veterans are willing to wager a guess at what the future holds. Visionary geospatial icon Terry Martin of ESRI explains: "GIS aware robotic systems can form the basis for a virtual neural network of sensors around the world. Further, those robotic systems can be coordinated with GIS to act on information."
 |
Whether contributing to your GIS or accessing data from it, spatial robotics are a rapidly evolving tool with enormous value for the interior space world.
From Our Homepage
Saying Farewell to an Amazing Journey
Communicating with Maps
Is There a GIS Career Ladder?
What does it mean to be geospatially smart? Series
Ways Real Estate and Property Developers Utilize Melissa GeoData for Data-Driven Decisions
Unlocking Value From Daily Satellite Imagery and Insights
Maximizing the Value of Your Address Data with Geo Addressing
How Indoor Mapping Enhances the Security of Smart Buildings
Look Ahead: AI, Location Intelligence and Efficiency
Collaboration Takes on Sea Level Rise & Dynamic Technology Environments
Brownies for Brownfields
Has Everything Been Mapped Already?
How Is Data Literacy Changing in an Artificial Intelligence Landscape
Portfolios for GIS Professionals: More Than Just Maps
How to Create a Distance Matrix in QGIS - A Step-by-Step Guide
7 Ideas for Bringing GIS into the K-12 Classroom
The Geography of Movement