
Telit Cinterion Expands Swift Navigation Positioning Offering


Precise IoT location is getting easier to buy and deploy. Telit Cinterion has widened its work with Swift Navigation so customers can access Skylark precise positioning as part of one integrated package, giving them a simpler path to sub-meter GNSS performance over a cellular network.
No audio is available for this content.
The expanded deal brings Swift Navigation’s Skylark service into Telit Cinterion’s IoT positioning stack. In practice, that means customers can source the GNSS module, cellular connectivity, and correction data from one place instead of stitching together separate vendors and infrastructure.
From Technical Linkup to Broader IoT Package
The relationship started in 2024 as a technical partnership, and it has now matured into a fuller commercial offer. Telit Cinterion is combining dual-frequency GNSS hardware with NExT connectivity so Skylark Dx correction data can be delivered as part of a more seamless navigation workflow.
From what I’ve seen in location projects, this kind of packaging matters. It trims contract overhead and reduces integration friction, especially where computer hardware, cloud services, and field deployment all have to line up cleanly.
Customers can now purchase modules, connectivity, and correction services under a single contract. For many deployments, that removes the need to coordinate multiple suppliers and helps avoid the cost and engineering burden of creating or subscribing to an RTK base-station network.
Skylark Service Options and Module Support
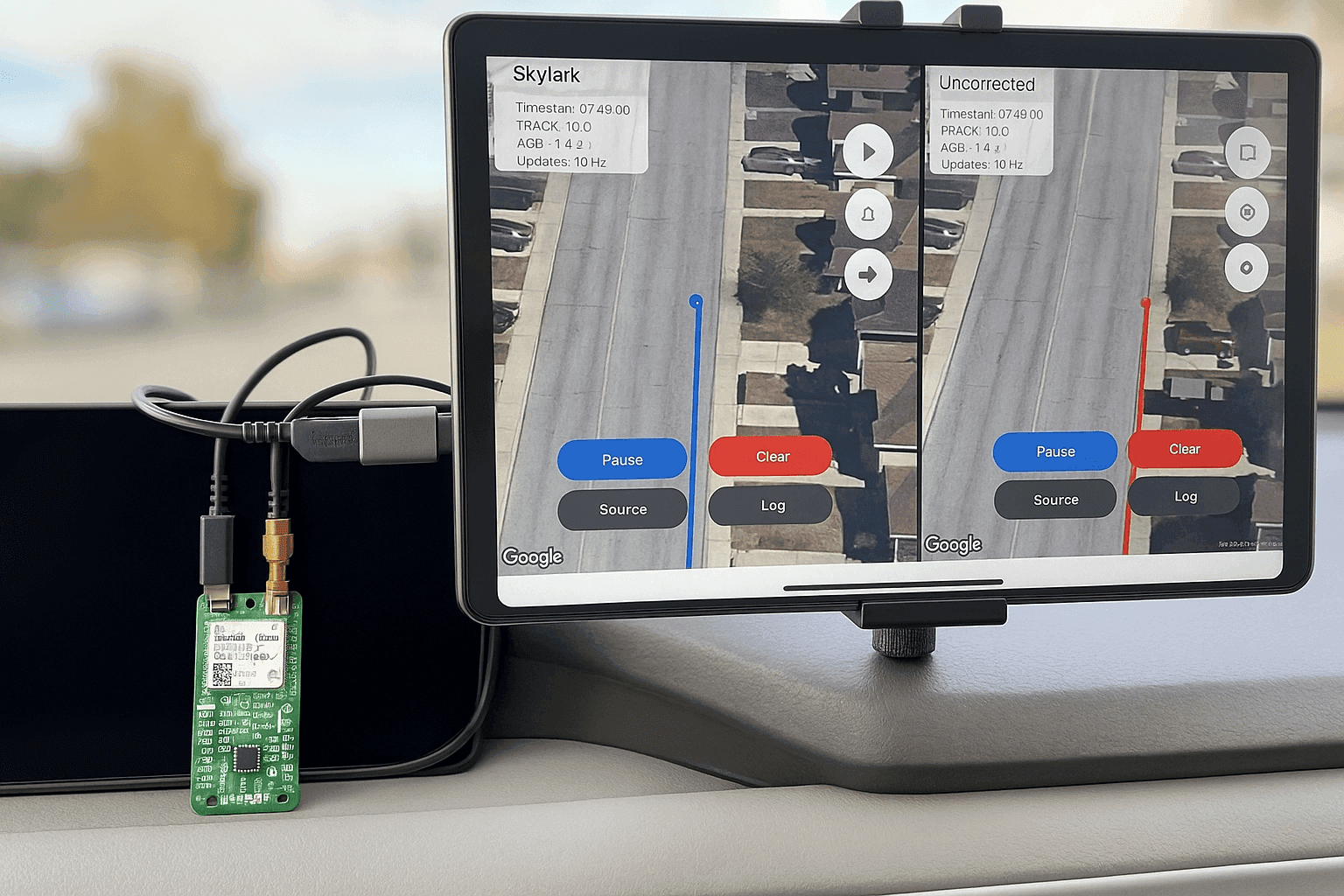
Skylark is Swift Navigation’s cloud-based precise positioning service. It works by sending GNSS correction data over IP to a compatible receiver in near real time, so the device can reduce common satellite and signal errors and hold a tighter position estimate in the field.
GNSS corrections matter because a raw satellite fix is rarely perfect. Correction data helps account for timing drift, atmospheric effects, and other signal distortions, which is why services like Skylark can push supported devices from standard GPS-grade output toward sub-meter accuracy, or tighter results with RTK-capable setups.
| Variant | Positioning Profile | Typical Fit |
|---|---|---|
| Skylark Dx | Sub-meter service with modest bandwidth and power demands | IoT tracking and mobile field systems |
| Skylark Cx | Higher-precision correction option for deployments that need a tighter error budget | Projects that need more accuracy than Dx without moving straight to full RTK |
| Skylark Nx RTK | RTK-grade service for supported hardware using real-time correction streams | Use cases that need centimeter-level positioning |
That spread gives buyers a straightforward way to choose. Dx fits devices that need broad coverage and efficient data use, while Nx RTK is the step up when the job calls for the tightest possible positioning. Cx sits between those two service levels.
All Telit Cinterion dual-frequency L1 + L5 GNSS modules support Skylark Dx natively. That service sends differential GPS and GNSS correction data straight to the receiver through the Internet using Networked Transport of RTCM via Internet Protocol. The setup runs over standard RTCM and NTRIP, uses modest bandwidth, and is designed for broad regional coverage.
Compatibility is not limited to the bundled Telit Cinterion approach. In practical terms, a device needs a GNSS receiver that can ingest supported correction data, IP connectivity to reach the service, and software or firmware that can handle RTCM and NTRIP session flow.
Connecting a device is fairly direct. First, provision compatible GNSS hardware and cellular or IP access. Next, point the receiver or host software to the Skylark correction stream using the supported NTRIP or RTCM method. Then confirm the device is receiving corrections and producing the expected fix quality. When I checked similar setups, most issues showed up at the stream login or receiver configuration stage.
Accuracy and reliability depend on more than raw correction delivery. Skylark is designed around continuous cloud-fed corrections and supported dual-frequency GNSS inputs, which helps receivers stay stable when satellite conditions are less clean. In harder environments, reliability still depends on antenna placement and network quality. The article material provided here does not detail any specific anti-spoofing feature set, so that part remains unclear.
That matters for IoT devices that live on tight power budgets or limited data plans. In mapping terms, it is a bit like getting a cleaner frame of reference without having to build the full ground infrastructure yourself. The result is better accuracy and precision for satellite navigation devices that need reliable positioning in the field.
Typical use cases include:
- E-mobility and fleet tracking
- Robotics, including drones and UAV systems
Related uses can extend into construction or agriculture where moving equipment needs dependable position updates. These applications usually do not need centimeter-grade real-time kinematic positioning, but they still benefit from dependable sub-meter output. If a project later needs tighter positioning, customers can move up to Skylark Nx RTK on supported module versions without redesigning the device or changing supplier relationships.“Customers tell us they want precise positioning without complexity,” said Neset Yalcinkaya, president of IoT hardware at Telit Cinterion. “We’re bundling Skylark Dx with the GNSS modules and cellular connectivity we already ship. This gives customers one supplier and a single integration approach, plus a clear path to RTK down the road.”“At Swift Navigation, our mission is to make precise positioning a standard capability,” said Holger Ippach, chief operating officer at Swift Navigation. “This partnership advances that vision by embedding Skylark into Telit Cinterion’s GNSS modules and connectivity, giving customers direct access to reliable, sub-meter positioning without the integration overhead traditionally required.”
Availability and Regional Coverage
Skylark Dx is available now with Telit Cinterion solutions across Europe, North America, Japan, South Korea, and Taiwan. Coverage is expected to widen as Swift Navigation adds more regions.
To check current availability, the practical step is to review Swift Navigation coverage material or the related Telit Cinterion product documentation before deployment. Regional support can change over time, so project teams usually need the latest service map or coverage note during planning.
I read this rollout a bit like a GIS coverage layer. The immediate value is in places where infrastructure, vehicle tracking, or construction systems already depend on steady satellite navigation data and resilient communication protocol support. That can be especially useful for fleet management, GPS tracking unit deployments, or automotive safety applications that rely on cloud-delivered corrections.
Further Information
According to our research, the next resources most buyers look for are setup notes, coverage updates, and trial access. The material provided here does not confirm a free trial for Skylark, so that should be checked directly in current product documentation before planning an evaluation.
For teams getting started, the key references are the module documentation and the service setup material for GNSS corrections over NTRIP. If RTK or NTRIP issues appear, the first checks are usually stream credentials and whether the receiver is actually consuming correction data. I would also verify firmware support and signal quality before blaming the service itself.


